
Part 1: NASA Crater Detection
This is Part 1 of a two-part series on crater detection using deep learning. Read Part 2 →
Introduction 🚀

As cislunar space grows increasingly crowded, spacecraft face heightened risks during navigation. Traditionally, space missions rely on Earth-based communication to determine their location. But what happens when communication is lost?
To solve this, NASA is developing TRON (Target & Range-adaptive Optical Navigation) — a next-gen system that allows spacecraft to determine their position independently, without Earth’s help.
TRON uses two methods:
- Planetary Triangulation for long-range navigation by measuring angles between celestial bodies.
- Crater-Based Localization for close-range navigation by detecting and matching craters seen in images with pre-mapped craters on the lunar surface.
This project focuses on crater detection — a key component of crater-based localization. Accurate crater recognition helps spacecraft understand their exact position, enabling autonomous operation in deep space.
📺 Watch a 1-minute project summary:
Project Objective 🌕
The goal is to build a system that automatically detects lunar craters in spacecraft images and fits an ellipse around each crater’s rim.
This is challenging due to:
- Visual complexity: Craters vary in size, lighting, and visibility.
- Hardware constraints: Must run on CPU (no GPU), under 20s per 5MP image, < 4GB RAM (like a Raspberry Pi 5).
These demand fast, lightweight deep learning models that can handle real-world noise and variability.
Literature Review 🧠
Early crater detection used edge detection and hand-crafted features, but struggled with shape and lighting variations.
Modern deep learning approaches:
- Single-stage (e.g., YOLO, SSD) for speed.
- Two-stage (e.g., Faster R-CNN, Mask R-CNN) for precision.
We compare:
- YOLOv10: Fast, efficient real-time bounding box detector.
- Ellipse R-CNN: Detects and fits elliptical shapes to crater rims.
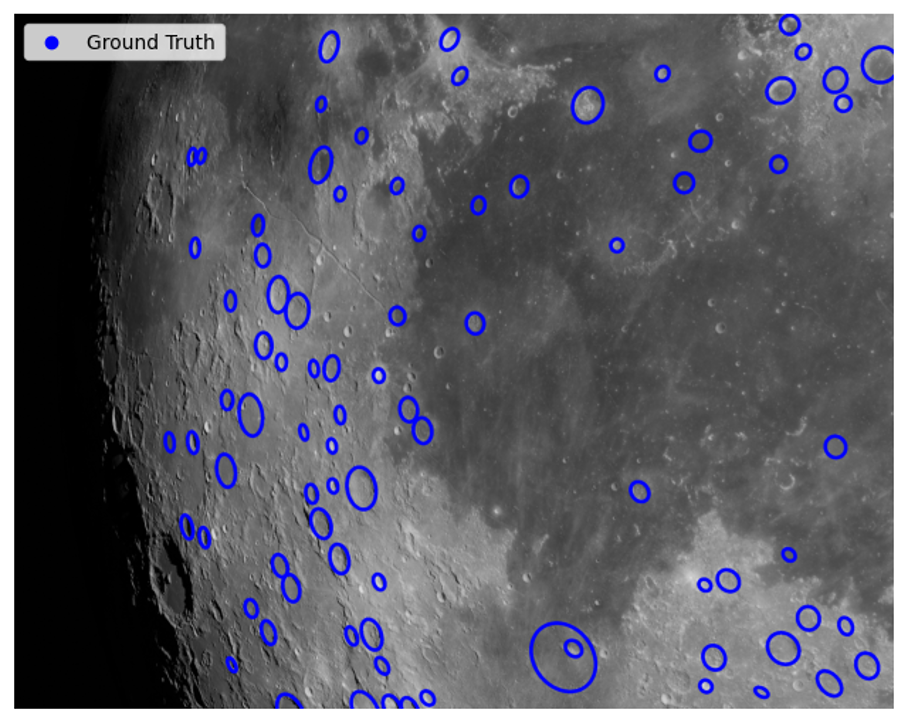
Dataset 📸
We used a synthetic lunar crater dataset developed by NASA (via the Boromir engine), based on the crater catalog by Robbins (2019).
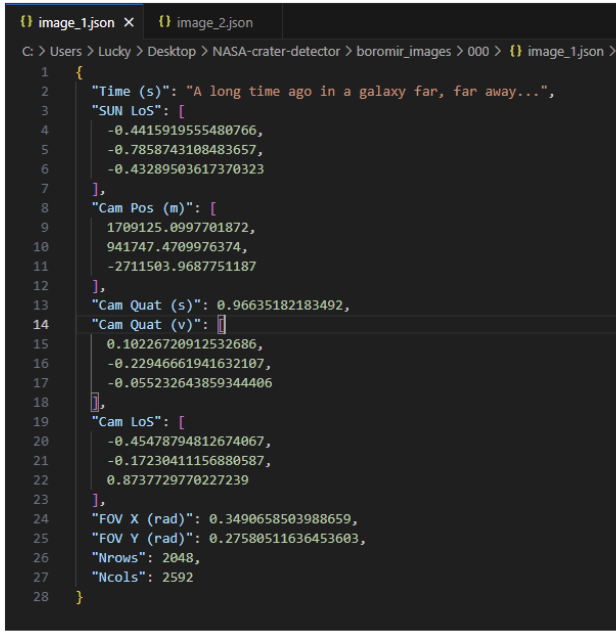
🗂️ Composition:
- 1,000 grayscale images (2592×2048 px)
- Paired JSON metadata: camera pose, sun angle, etc.
- Dual label formats: YOLO (bounding boxes) & EllipseRCNN (elliptical params)

🖼️ Dataset Preview
⚠️ Challenges & Fixes
- Misaligned masks from auto-generation
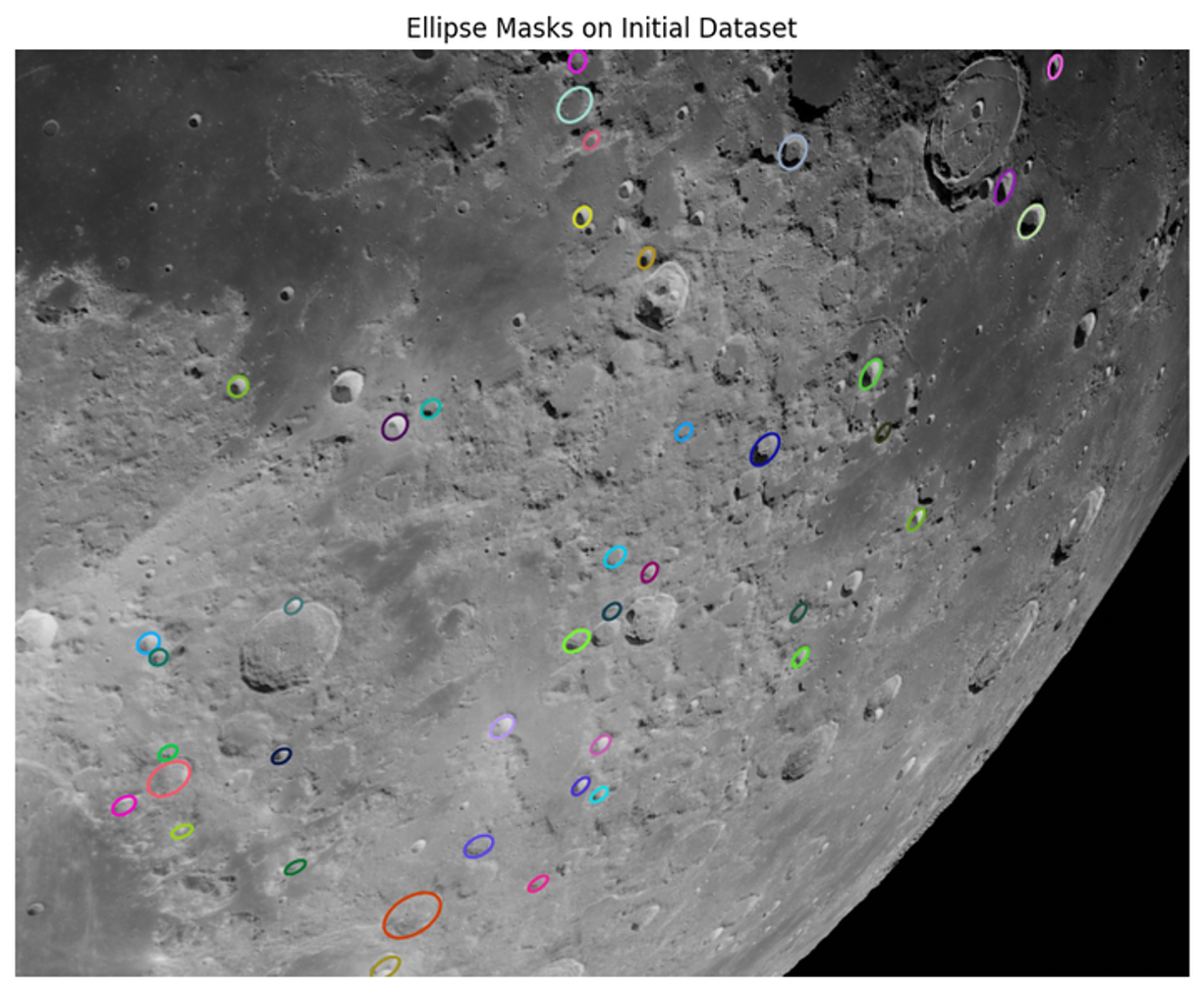
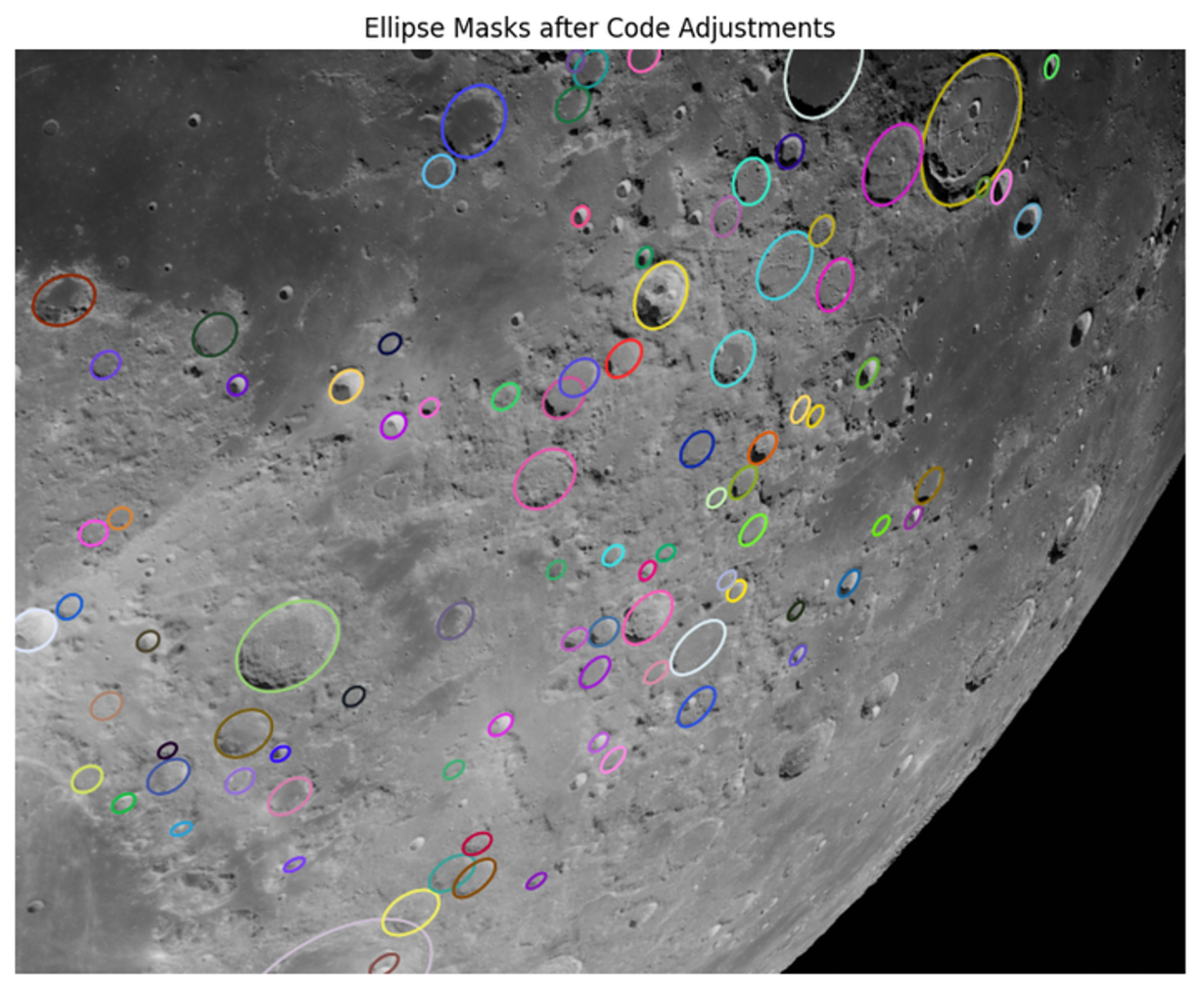
- Extensive manual refinement using Label Studio
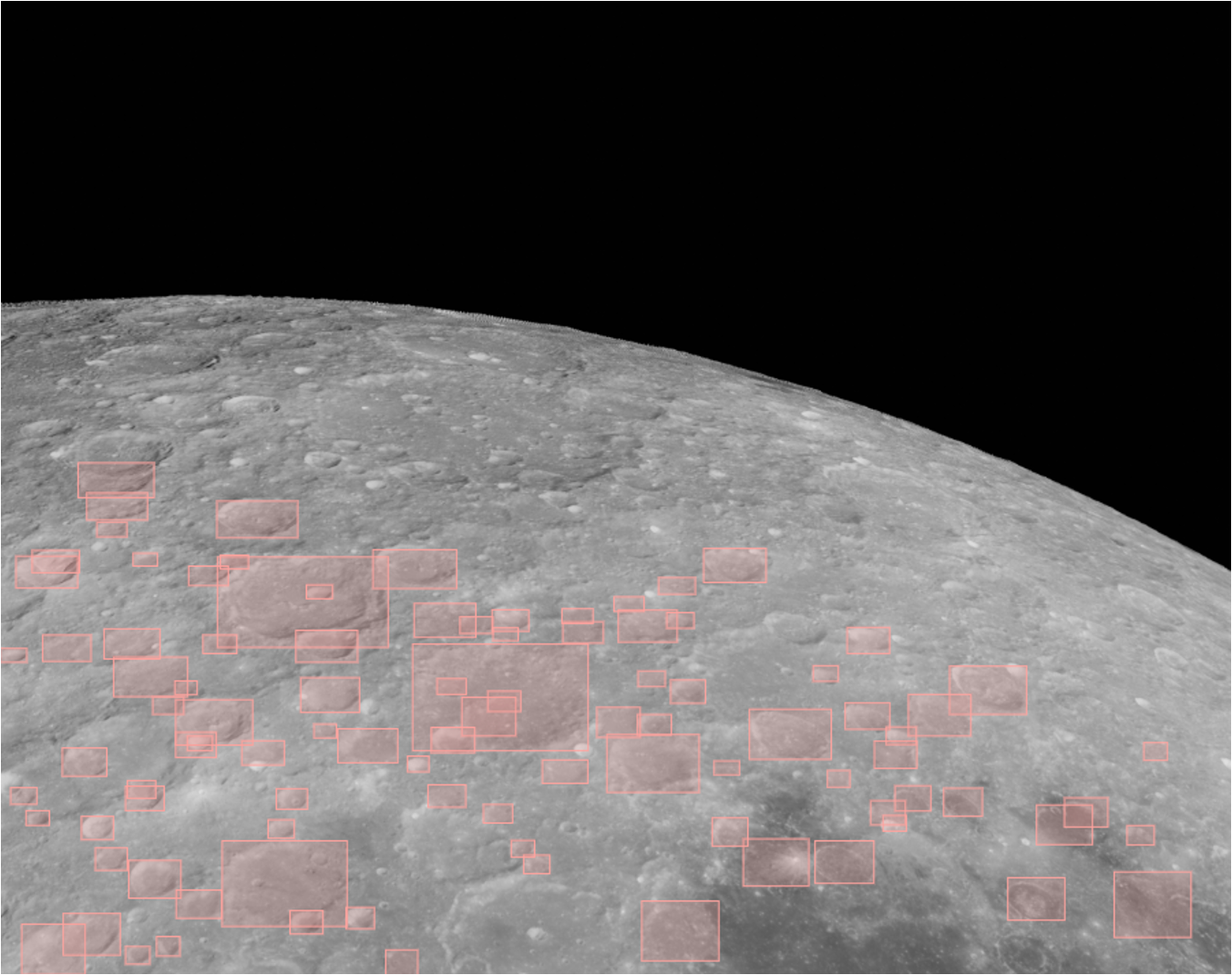
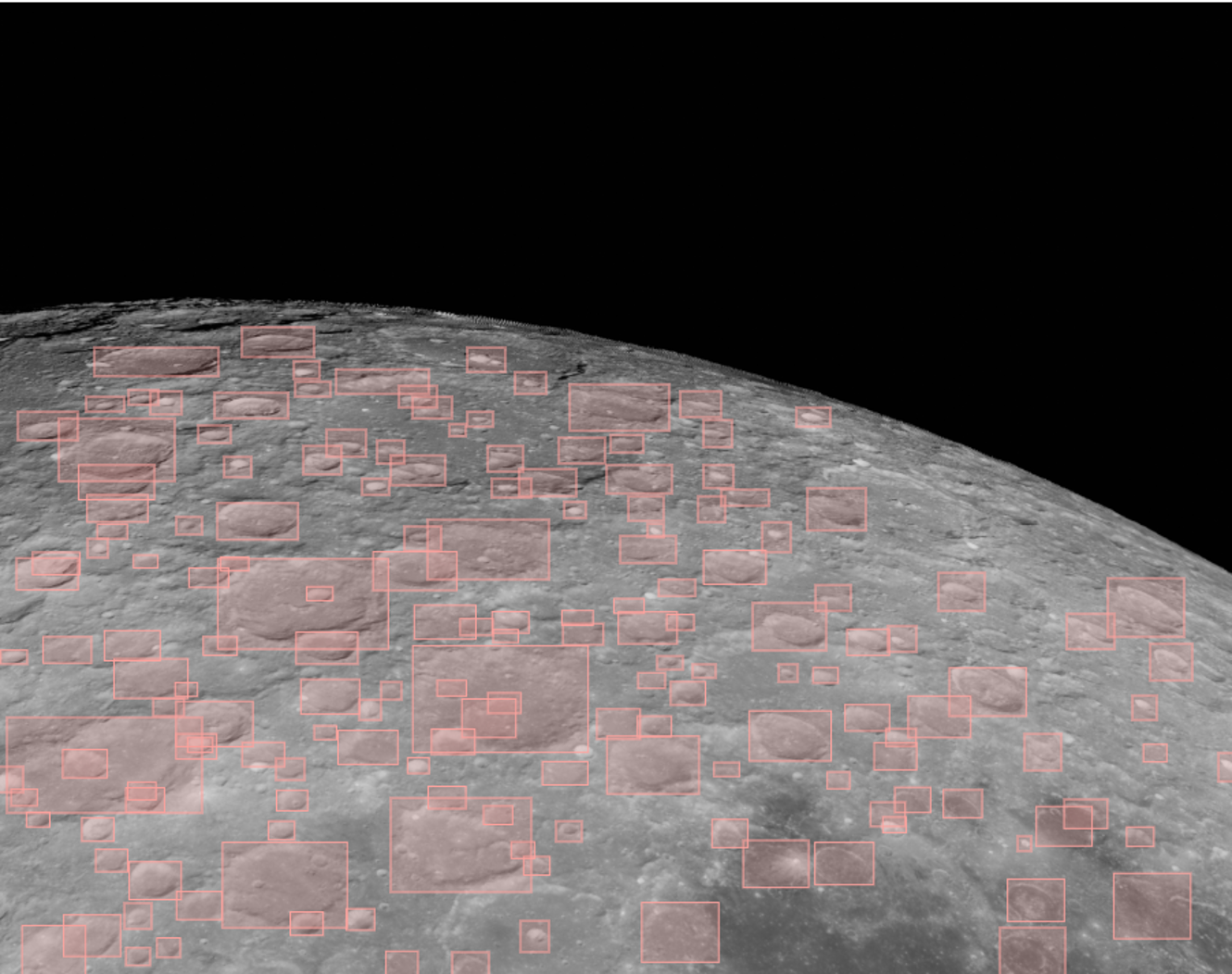
- Ellipses converted to bounding boxes for YOLO

4. Experiments
🧪 Train/Test Split:
80/20 for both models
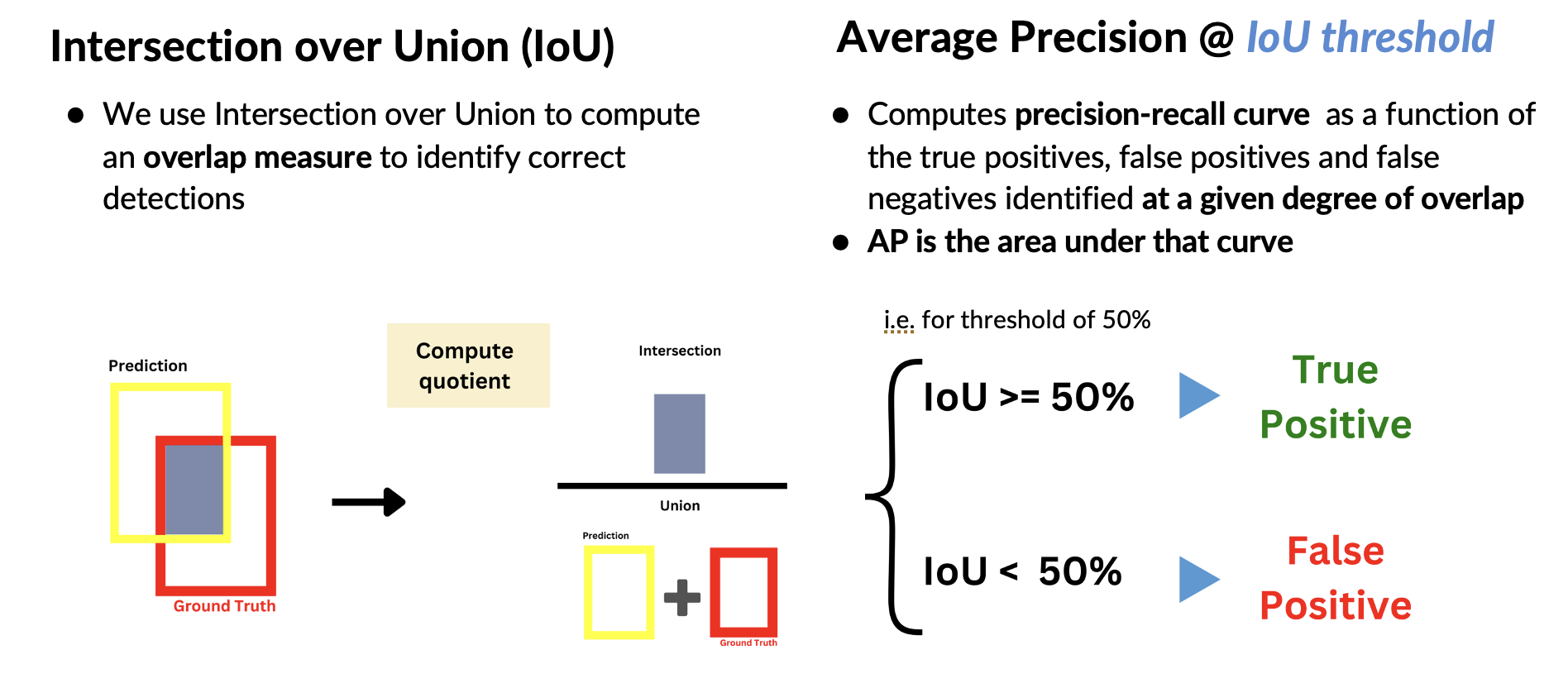
Evaluation Metrics
We use Intersection over Union (IoU) and Average Precision (AP) from PR curves to assess model accuracy and ranking.
YOLOv10 📦
- Model:
YOLOv10m(mid-sized, balance of speed/accuracy) - Trained for 100 epochs using Ultralytics
- Images resized to 640×640
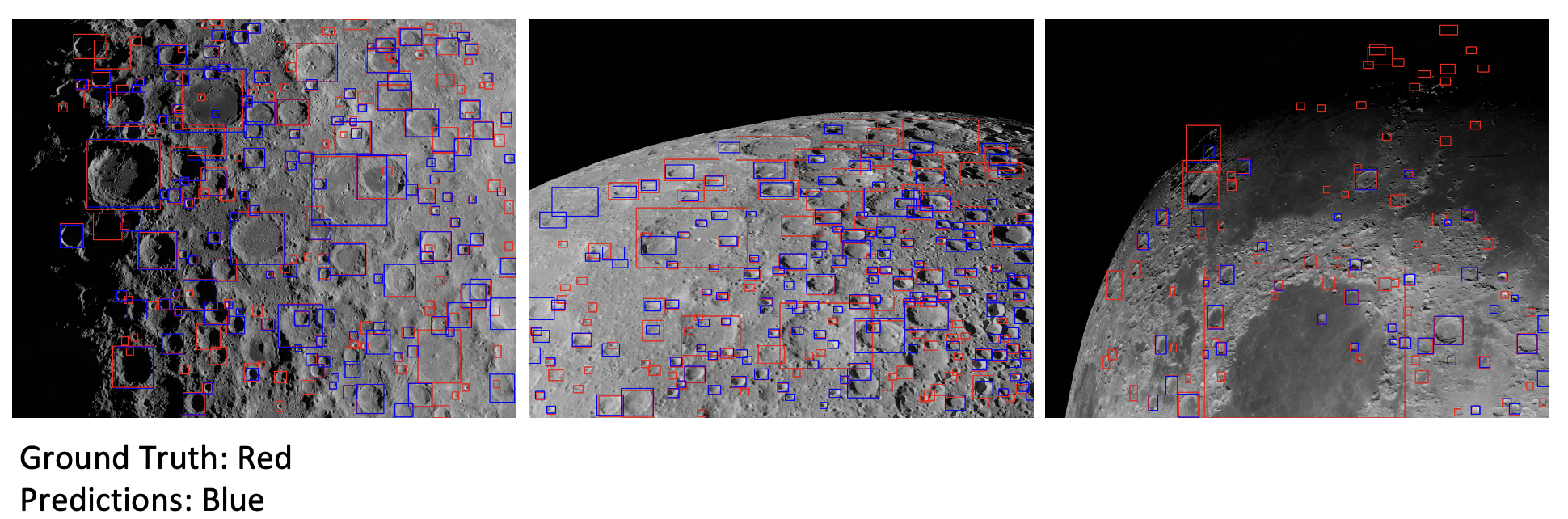
Results:
- Precision: 65%
- Recall: 51%
- mAP@0.5: 57%
- COCO-style mAP (0.5–0.95): 34%
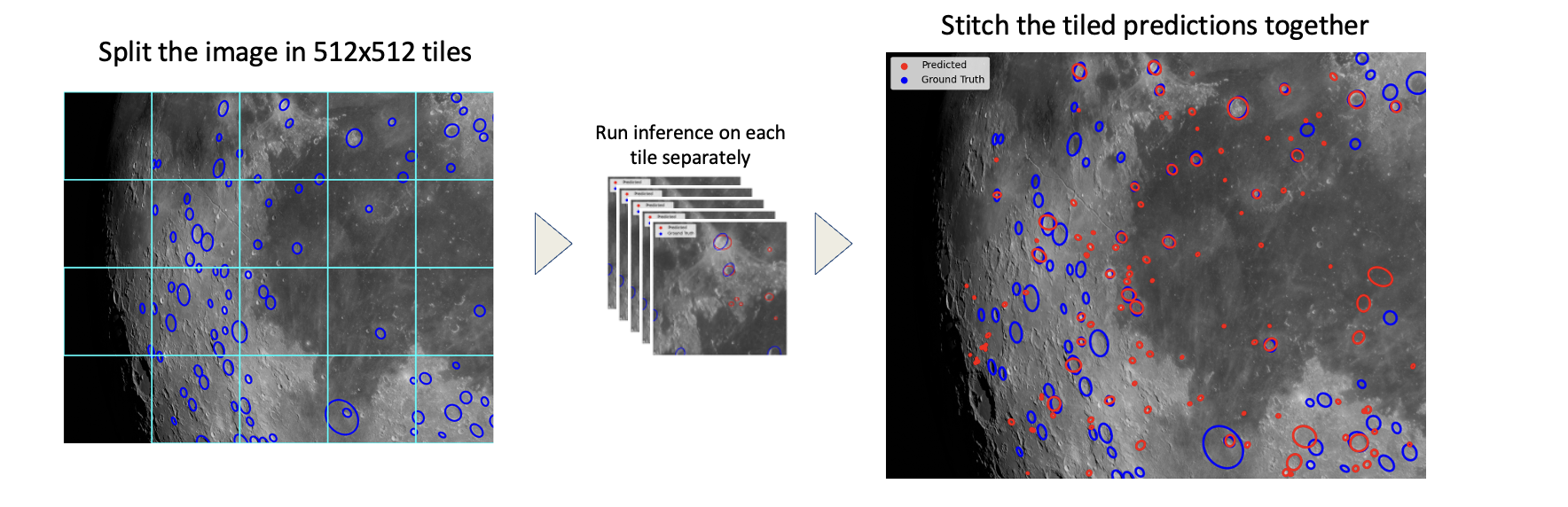
Ellipse R-CNN 🌀
- Backbone frozen, trained only on proposal, regression & occlusion modules
- Tiling (512×512) significantly improved detection
- Trained for 40 epochs, batch size 32
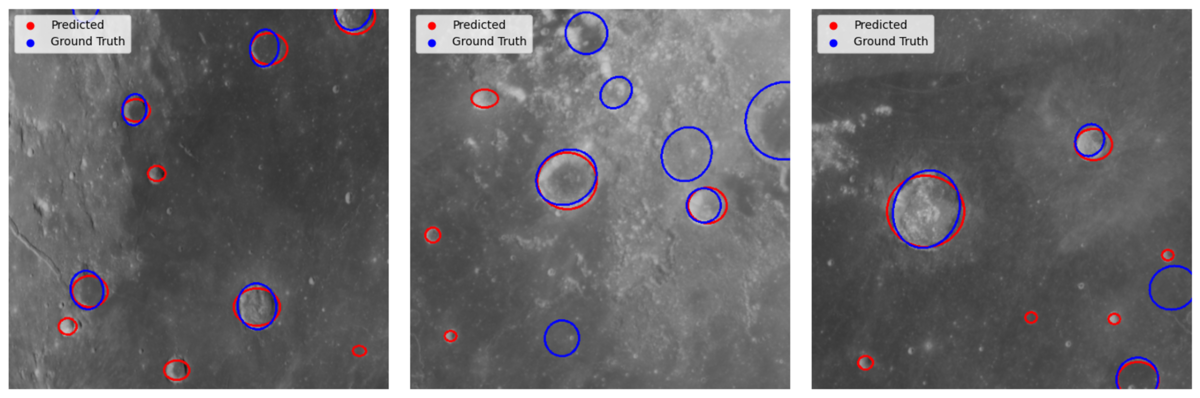
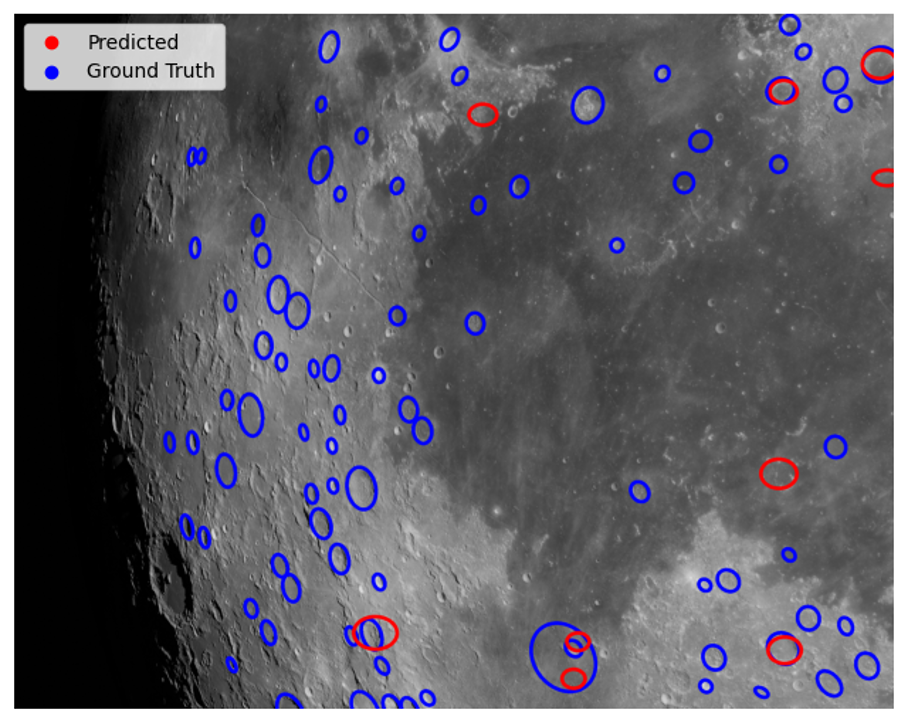
Results (on hold-out 100 images):
- mAP@0.5: 17.2%
- mAP@0.7: 9.9%
5. Next Steps 🧭
🔄 Evaluation Alignment
Define consistent dataset splits across YOLO and EllipseRCNN to ensure fair model comparison.
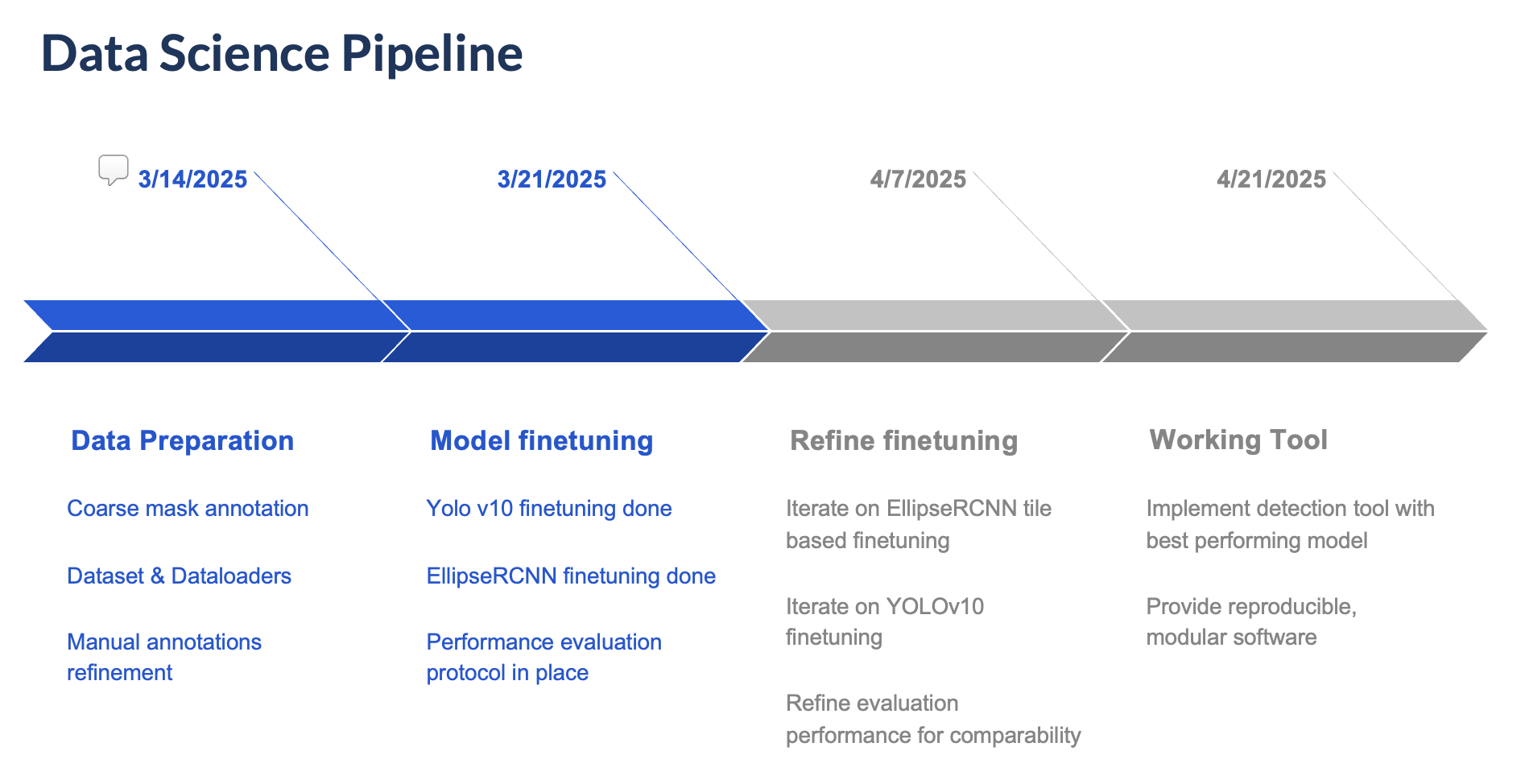
🔧 EllipseRCNN
- Apply tiling during training
- Explore optimizers, learning schedules
- Address patch edge inference issues
⚙️ YOLOv10
- Use full 1000-image dataset
- Add tiling + augmentation
- Train for 300 epochs
- Try larger YOLOv10 variants
- Apply same eval metrics as EllipseRCNN