
Exploring GaussianObject: 3D Reconstruction from Sparse Views
Introduction 🔍
I became interested in Gaussian Splatting after seeing its promising results in rendering high-quality 3D scenes in real-time. One consistent requirement, though, is the need for accurate camera poses — often derived from COLMAP — which isn’t always reliable or feasible, especially with casual, real-world imagery.
That’s when I came across the paper:
GaussianObject: High-Quality 3D Object Reconstruction from Four Views with Gaussian Splatting
SIGGRAPH Asia 2024 (ACM TOG)
Project page | GitHub
The idea that stood out most was:
“COLMAP-free 3D object reconstruction with only 4 input images, using Gaussian Splatting + diffusion repair.”
Why This Was Exciting
- No need for accurate poses (optional COLMAP-free mode!)
- Works with as few as 4 images
- Uses a clever visual hull + repair strategy
- Introduces diffusion-based Gaussian repair with LoRA
So I gave it a try — running the model across a variety of object image sets (from 4 to 40 images), and setting it up on Modal for GPU access.
What I Found 🧪
- SAM (Segment Anything) was critical to generate good masks — otherwise performance dropped.
- Reflective or metallic objects were particularly hard to reconstruct.
- Smaller objects were challenging — due to scale and mask precision.
- Despite being “COLMAP-free”, having better pose estimates significantly helped reconstruction.
- The input images need some view consistency — widely differing angles didn’t work well.
- Processing more than 12 images dramatically increased rendering time — 40 images took 12+ hours!
They currently use MASt3R for pose estimation, but a new MASt3R-SfM (retrieval-based) version is out — I’d love to test how that affects results. (Update: I’ve already written project pages on MASt3R and MASt3R-SfM — check them out!)
Pipeline Overview 🧵
GaussianObject consists of multiple stages:
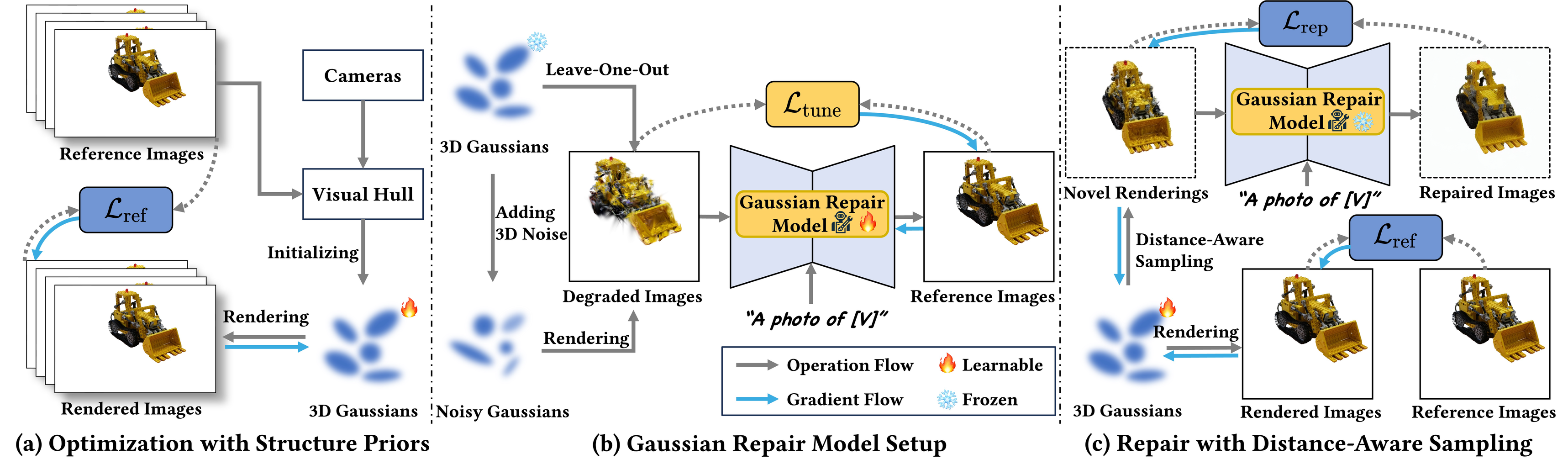
📌 Diagram from the official project page. All credits to the original authors.
(a) Visual Hull & Optimization
- Create an initial 3D Gaussian representation using masks + camera parameters
- Refine using floater elimination
(b) Leave-One-Out Training
- Add 3D noise to Gaussians to create corrupted renderings
- Use these to train the repair model via paired clean-corrupted image supervision
(c) Gaussian Repair
- Identify views that need repairing (distance-aware sampling)
- Use diffusion LoRA to refine + repair the Gaussians
Setup Instructions ⚙️
I followed the steps on the GitHub repo, summarized below.
🧬 Environment
# Clone repo with submodules
git clone https://github.com/chensjtu/GaussianObject.git --recursive
# Install PyTorch (CUDA 11.8)
pip install torch torchvision --index-url https://download.pytorch.org/whl/cu118
# Install Python deps
pip install -r requirements.txt
🖼️ Prepare Your Data
# Download SAM + DUST3R/MAST3R
cd models
sh download_preprocess_models.sh
cd ..
Use this folder structure:
GaussianObject/
└── data/<your_dataset>/
└── images/
├── 0001.png
├── 0002.png
└── ...
└── sparse_4.txt
└── sparse_test.txt
Generate masks with segment_anything.ipynb and poses with:
python pred_poses.py -s data/<your_dataset> --sparse_num 4
Training Stages 📈
1. Visual Hull Initialization
python visual_hull.py --sparse_id 4 --data_dir data/<your_dataset> --reso 2 --not_vis
2. Coarse Gaussian Splatting
python train_gs.py -s data/<your_dataset> -m output/gs_init/<your_dataset> \
-r 4 --sparse_view_num 4 --init_pcd_name visual_hull_4 \
--white_background --random_background
3. Leave-One-Out Training
python leave_one_out_stage1.py ...
python leave_one_out_stage2.py ...
4. LoRA Fine-Tuning + Repair
python train_lora.py ...
python train_repair.py ...
5. Rendering
python render.py -m output/gs_init/<your_dataset> \
--white_background --render_path --use_dust3r \
--load_ply output/gaussian_object/<your_dataset>/save/last.ply
For full options, visit the GitHub instructions.
Final Thoughts 🧠
Despite the complexity, I was genuinely impressed by the results given so little input (just 4 images!). That said, performance on reflective, fine-grained, or small-scale objects still leaves room for improvement.
The reliance on good segmentation and view coverage also means pose quality still matters, even in COLMAP-free mode.
A Note on MASt3R-SfM and Retrieval 🔄
While GaussianObject advertises a COLMAP-free pipeline by using MASt3R or DUSt3R for pose estimation, I became curious about how results might improve using MASt3R-SfM — a newer, retrieval-augmented version of the MASt3R pipeline.
Why this matters:
1. GaussianObject still benefits from accurate poses
Even in CF mode, they rely on MASt3R — because pose quality heavily impacts rendering.
2. MASt3R-SfM adds retrieval
It selects the most semantically relevant reference views to improve relative pose prediction, especially useful for sparse or inconsistent input images.
3. Retrieval enhances robustness
It reduces errors in challenging settings (e.g. varying angles, little overlap), resulting in:
- Better initial poses
- Fewer downstream reconstruction issues
- Improved Gaussian consistency
From my testing, MASt3R-SfM consistently delivers some of the best results I’ve seen in sparse-view scenarios — especially with casually captured data.
📢 Want to learn more? Check out the dedicated project pages on MASt3R and MASt3R-SfM for setup, comparisons, and deeper insights.
Resources & Links 📚
- Paper
- GitHub Repository
- MASt3R
- MASt3R-SfM
- SAM (Segment Anything)
- Modal for GPU cloud execution
Reference: Yang et al., GaussianObject: High-Quality 3D Object Reconstruction from Four Views with Gaussian Splatting, ACM TOG 2024.